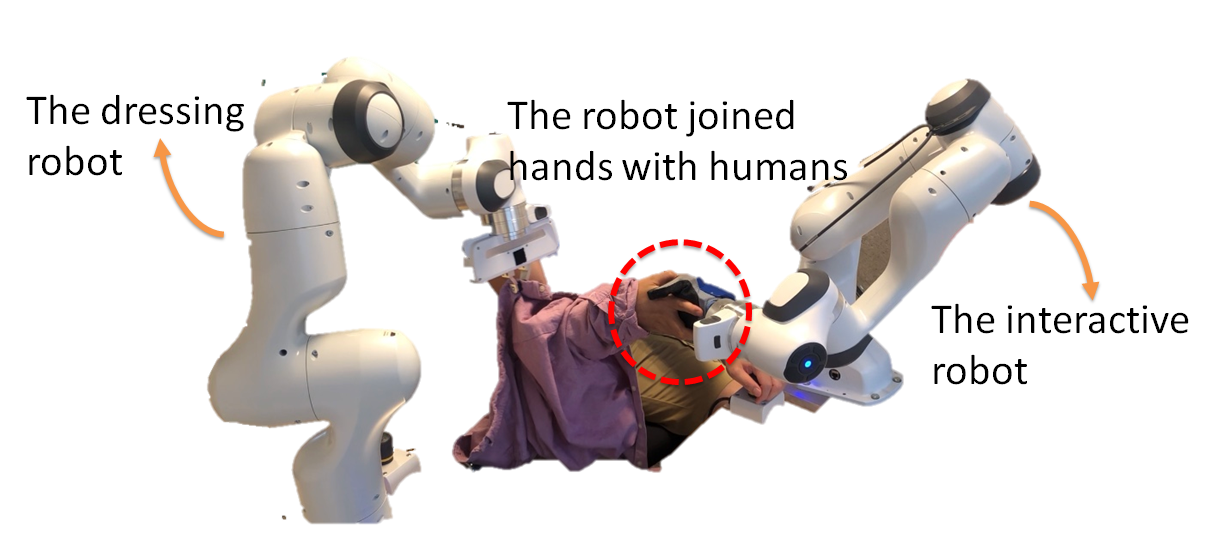
Robotic Manipulation Planning for Shaping Deformable Linear Objects With Environmental Contacts Bimanual Dressing Assistance
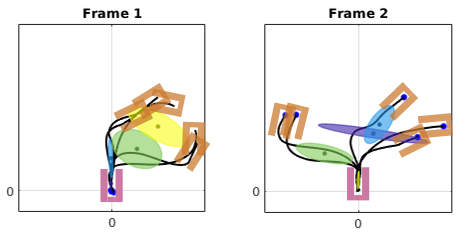
Learning Task-Parameterized Skills from Few Demonstrations Data efficient Task-Parameterized Learning
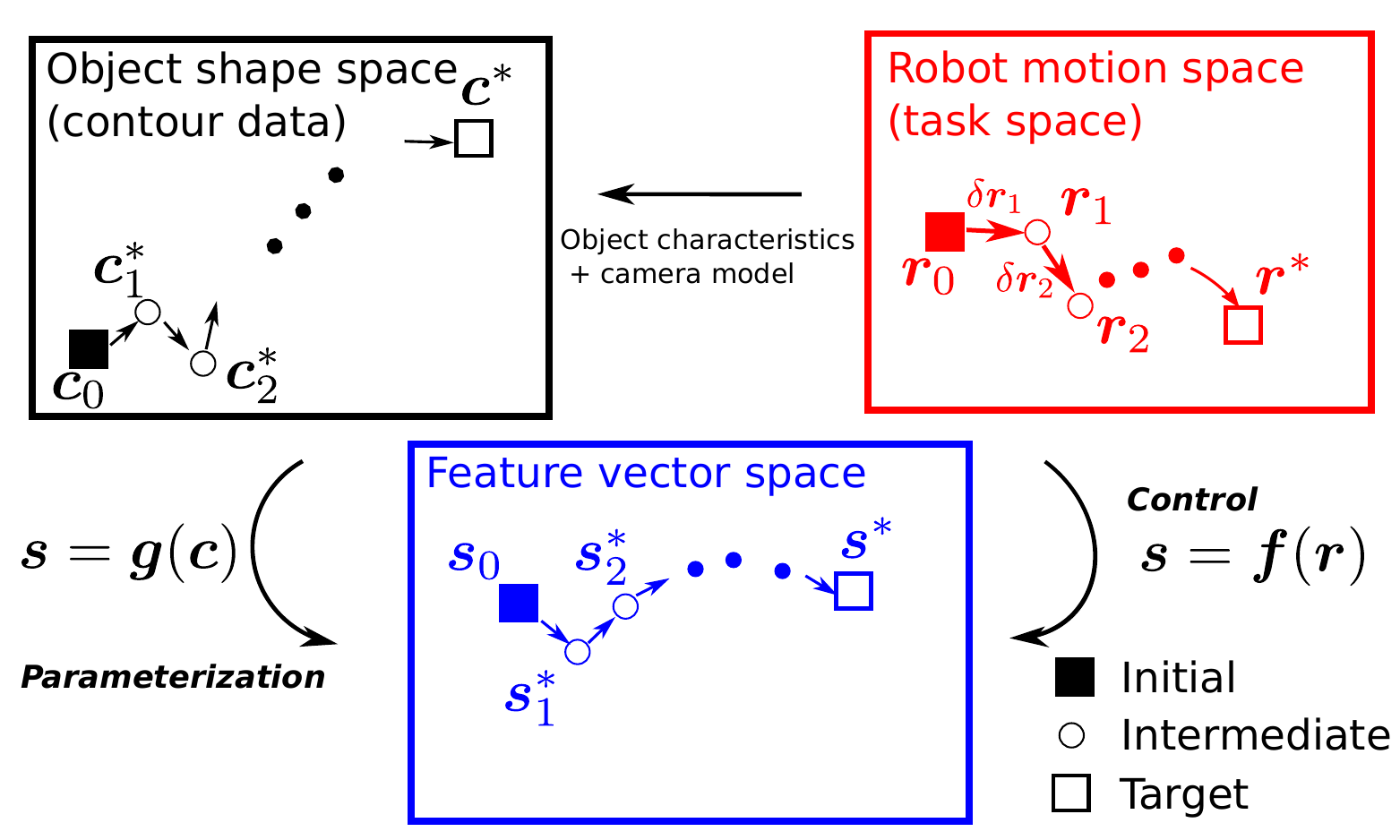
Vision-based Manipulation of Deformable and Rigid Objects Using Subspace Projections of 2D Contours Unified Shape Servoing Framework